 GDU
GDU
 ÛÛÛFLY
ÛÛÛFLY DJI
DJI MMC
MMC GDU
GDU XAG
XAG AOLAN
AOLAN KÎL
KÎL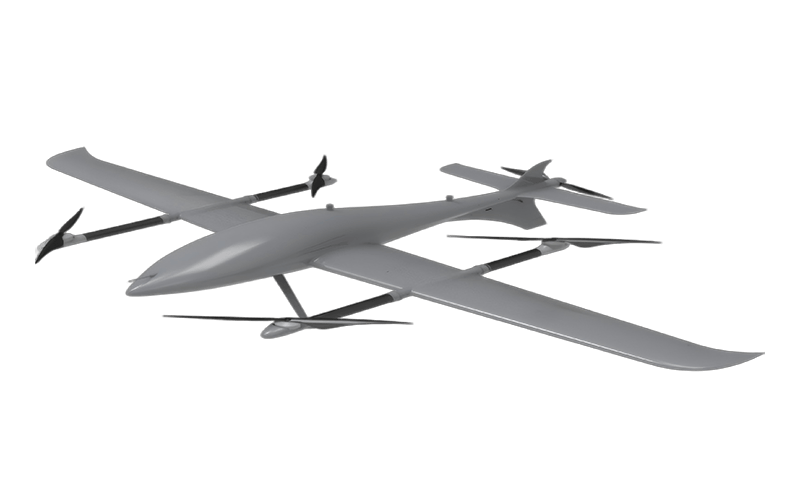 ASMANÊ PIŞTRE
ASMANÊ PIŞTRE
Dragonfish Standard: Next-Niss Multi Mission eVTOL
Dragonfish Standard Piralî ya Pir-Mîsyon eVTOL UAV
Berxwedana Hevseng, Nermbûna Barkêşiyê û Belavkirina Bilez ji bo Serlêdanên Pîşesazî û Ewlekariya Giştî

Dragonfish Standard Piralî ya Pir-Mîsyon eVTOL UAV
Berxwedana Hevseng, Nermbûna Barkêşiyê û Belavkirina Bilez ji bo Serlêdanên Pîşesazî û Ewlekariya Giştî
Firîna Bêdeng
Dragonfish bi saya pergala xwe ya pêşvebirinê ya bêhempa û sêwirana xwe ya nûjen a kêmkirina deng, firînek pir bêdeng pêk tîne. Li jor 400 ft (120m) AGL* bi zorê tê bihîstin, DF xetera tespîtkirinê bi girîngî kêm dike di heman demê de nepeniya operasyonê misoger dike.
Zêdetir Fêr Bibe >>

Firîna Bêdeng
Dragonfish bi saya pergala xwe ya pêşvebirinê ya bêhempa û sêwirana xwe ya nûjen a kêmkirina deng, firînek pir bêdeng pêk tîne. Li jor 400 ft (120m) AGL* bi zorê tê bihîstin, DF xetera tespîtkirinê bi girîngî kêm dike di heman demê de nepeniya operasyonê misoger dike.
Zêdetir Fêr Bibe >>
Dij-Mudaxeleya Bilind
Di jîngehên tevlihev de, UAV performansa ragihandin û veguhestina vîdyoyê ya bêhempa diparêze, bi kapasîteyên dijî-destwerdanê yên bihêz û veguhestinek domdar û pêbawer.

Dij-Mudaxeleya Bilind
Di jîngehên tevlihev de, UAV performansa ragihandin û veguhestina vîdyoyê ya bêhempa diparêze, bi kapasîteyên dijî-destwerdanê yên bihêz û veguhestinek domdar û pêbawer.
Çima Pispor Dragonfish Standard Hildibijêrin?

Parastina Windabûna GNSS
Dema ku di jîngehên ne-GNSS de dixebite, UAV parastina daketinê çalak dike, û bixweber ji pozîsyona xwe ya heyî dadikeve da ku ewlehiyê misoger bike.
Vegera Kêm-Pîlê
Bikarhêner dikarin asta bataryayê ya daketinê ya texmînkirî xweş bikin. UAV li gorî asta bataryayê ya heyî û rewşa firînê dema vegerê ya çêtirîn di wextê rast de hesab dike, û piştrast dike ku ew bi asta bataryayê ya nêzîkî sînorê ku bikarhêner diyar kiriye dadikeve.
Vegera Sînyala Windabûyî
Eger sînyala di navbera UAV û stasyona erdê de qut bibe, parastina windakirina pêwendiyê çalak dibe. Ger sînyalên GNSS hebin, UAV vegera otomatîk a malê dest pê dike.
Guhertina Destî ya Awarte
Di rewşa awarte de, hûn dikarin her dem kontrolkera dûr veguhezînin moda M da ku tavilê kontrola destî bigirin destê xwe, û ewlehiya firînê misoger bikin.

Pirjimarî Kêmkirin, Ewlehiya Mîsyonê Misoger Dike
eVTOL di nav pêkhateyên sereke de (pîl, sensor, otobusên ragihandinê) û guheztina moda xweser de dubarekirinên pir-astî û cûdahiyên piralî pêşkêş dike, ku firîna stabîl û performansa pêbawer tewra di jîngehên tevlihev de jî misoger dike.
Xwe-Kontrolkirin bi Yek Tikandinê
Berî rabûnê bixweber kontrolkirina pergalê pêk tîne, da ku piştrast bike ku her firîn ewle û pêbawer e.
Vegerandina bi yek bişkokê
Bi rêya bişkoka Malê bi hêsanî vegere malê. Hilanîna Rehet: Piştî firînê zû birêxistin bike, hilanîna wê hêsan be û ji bo karanîna din amade be.
Şopandina Jîr
UAV dikare xwe bi hedefên xwe ve girêbide û bi awayekî nerm rêya firîna xwe biguherîne. Gelek modên şopandinê piştgirî dike.

Rabûn û daketina platforma mobîl
Piştgiriya rabûn û daketinê li ser platformên tevgerbar dike.
Taybetmendiyên Dragonfish Dragonfish Standard
| Taybetmendî | Hûrgulî |
| Awa | UAV-a pir-mîsyonê ya eVTOL a bi rotorê tilt |
| Pîvan | 1948 × 3295 × 520 mm (tevî perwaneyan) |
| Pîvan | 7.5 kg (tevî 2 batarya, perwane; bê barê gimbal) |
| Kapasîteya Barkirinê ya Herî Zêde | 1.5 kg |
| Dema Firînê ya Herî Zêde | 126 deqe (bi mîhengkirina barkirina standard) |
| Leza Herî Zêde ya Horizontal | 120 km/saet |
| Leza Herî Zêde ya Horizontal | 126 km/saet (35 m/s) |
| Berxwedana Bayê ya Herî Zêde | 15 m/s (moda baskê sabît), 12 m/s (moda firîna vertîkal) |
| Sînorê Xizmeta Herî Zêde | 5000 m ji asta deryayê bilindtir |
| Germahiya Xebatê | -20°C heta 50°C |
| Nirxandina IP-yê | IP43 |
| Piştgiriya GNSS | GPS + GLONASS + BeiDou + Galileo (pozîsyonkirina pir-komstêrkan) |
| Rêjeya Veguhestina Sînyala Herî Zêde | 30 km |
| Dema Bicîhkirinê | ≤5 deqîqe (civîna berdana bilez a bê amûr) |
Berawirdkirina Mezinahîyan

Vêra

Îstasyona Erdê ya Masîyê Ejderha

Veguheztina Antenna Smart a Autel (ASAT) (Vebijarkî)

Autel Dragonfish Nest (Bijarte)

Dubarekera Masîyê Ejderha (Vebijarkî)
Berhema adaptasyonê

Qaçaxçîtîya Peravê

Bicîhanîna Polîsan

Pêşîlêgirtina Şewata Daristanan

Muayeneya Xeta Elektrîkê

Mufetîşa Trafîkê




